
Sélection des GNSS et Inertiels pour le Renseignement, la Surveillance et la Reconnaissance
La technologie inertielle couplée au GPS / GNSS joue un rôle essentiel dans le domaine en pleine croissance des applications de renseignement, de surveillance et de reconnaissance (ISR). Cet article couvre les facteurs clés à prendre en compte dans la sélection de la meilleure intégration GPS / inertielle pour votre travail ISR particulier.
Wavec n’importe quel outil, vous avez besoin du bon pour le travail, et la technologie inertielle se présente sous de nombreuses formes, avec de nombreuses capacités différentes. S’il est sélectionné de manière optimale, votre système de Navigation inertielle assistée par GNSS (GNSS/INS) constituera la cheville ouvrière du positionnement de vos capteurs ISR pour de meilleurs résultats. Les clés à considérer sont les différences d’erreurs qui seront inévitablement rencontrées: déterminer, par rapport au niveau de performance souhaité, quelles erreurs sont tolérables et lesquelles ne le sont pas. C’est ce qu’on appelle le budget d’erreur et c’est la première chose à examiner avec des fournisseurs d’équipements compétents.
La technologie ISR trouve une application croissante dans l’armée, l’application de la loi, la recherche et le sauvetage, la patrouille frontalière, l’intervention en cas de catastrophe et de nombreux autres domaines. Dans la plupart des cas, une caméra aéroportée recueille des données clés de l’opération, pour localiser, cartographier et géoréférencer les points d’intérêt.
Typiquement, une caméra électro-optique et/ou infrarouge (EO/IR) est montée sur un cardan, un support pivotant qui fait tourner la caméra autour d’un axe simple ou double. Les systèmes à cardan sont courants sur les drones, les aéronefs et les navires. Ils permettent de diriger la charge utile du capteur vers des objets d’intérêt, indépendamment de l’attitude ou du mouvement de la plate-forme. Ce mouvement indépendant permet également une stabilisation (ou une régulation), découplant le mouvement et les vibrations à haute fréquence de la plate-forme ou du véhicule de ceux de la charge utile.
Pour diverses raisons, les charges utiles à cardan intègrent leur propre détection de position et d’attitude (cap / lacet, tangage et roulis) dans la plupart des applications, plutôt que de s’appuyer sur le GNSS/INS de la plate-forme. Le système de navigation de l’avion n’est peut-être pas assez précis pour géoréférencer des objets vus d’aussi loin que 10 000 mètres. Dans certains cas, le système de navigation de l’aéronef peut être critique pour la mission et donc indisponible pour les capteurs ISR. Enfin, la flexion de l’aéronef introduit des erreurs puisque l’INS de la plate-forme est typiquement monté près du centre de masse du véhicule et non co-localisé avec le cardan.
POSITIONNEMENT DES CAPTEURS
Pour la plupart des applications de pointage de cardan, y compris le géoréférencement, le système de contrôle de cardan nécessite des données de position, ce qui exclut une solution d’Unité de mesure Inertielle pure (IMU) ou de Système de Référence de Cap d’attitude (AHRS); il nécessite une option assistée par GNSS. Même pour les applications où le positionnement n’est pas nécessaire, les exigences de pointage de haute précision pendant le mouvement dynamique signifient que les performances dégradées d’un AHRS pendant une telle dynamique sont inacceptables; là encore, une solution assistée par GNSS est nécessaire.
Un système GNSS/INS est composé de capteurs inertiels (disponibles dans une variété de grades), d’un récepteur GNSS haute sensibilité et d’algorithmes de filtrage et de Kalman. Les mesures du récepteur GNSS sont couplées aux mesures inertielles pour fournir des estimations de position, de vitesse et d’attitude de plus grande précision et de meilleures performances dynamiques qu’un GNSS, un INS ou un IMU / AHRS autonomes peuvent fournir.
Un système GNSS / INS comprend généralement un gyroscope à 3 axes, un accéléromètre à 3 axes, un récepteur GNSS et parfois un magnétomètre à 3 axes pour déterminer une solution de navigation. Chacun de ces capteurs apporte différentes mesures — et différentes erreurs potentielles – au système GNSS/INS.
La combinaison de GNSS et d’INS leur permet de se compléter mutuellement, surmontant certaines des limitations auxquelles ils sont confrontés en tant que systèmes autonomes. Quelques problèmes restent à régler dans un système GNSS/INS intégré.
Cet article explique comment sélectionner la bonne combinaison GNSS/centrale inertielle pour une application spécifique et comment l’intégrer à la gamme complète des systèmes de pointage, de capteur et de géoréférencement.
AI-JE BESOIN D’UNE BOUSSOLE GNSS ?
Un GNSS / INS fournit des données précises dans des conditions dynamiques, généralement pour les plates-formes se déplaçant à 5 mètres / seconde (environ 11 mi / h) ou plus rapidement. Un composant GNSS à antenne unique est généralement fiable pour ce type d’application, étant capable de suivre le cap à travers un processus appelé alignement dynamique. Cela met en corrélation les mesures de l’accéléromètre avec les mesures GNSS pour suivre le cap en présence d’une accélération horizontale. Ce n’est pas la même chose que le cap-over-ground d’un système GNSS, mais c’est plutôt le véritable cap du système.
Comme il repose sur un alignement dynamique, un GNSS / INS à antenne unique perdra sa capacité à suivre avec précision le cap dans les applications où la plate-forme est stationnaire ou se déplace plus lentement que 5 mètres / seconde, comme les hélicoptères, les drones à rotor ou les navires. Même les gros aéronefs qui supportent de longues périodes de vol en ligne droite et en palier peuvent constater que leur solution d’assiette erre pendant de telles périodes de faible dynamique. Dans ces scénarios, un GNSS/INS avec boussole GNSS intégrée est préféré.
Une boussole GNSS est un système composé de deux récepteurs GPS connectés à deux antennes GNSS externes distantes d’une distance fixe. Des calculs GNSS différentiels sont utilisés pour déterminer la position relative des deux antennes GNSS avec une précision au millimètre pour mesurer le cap du système. La précision de cap de cette boussole GNSS est inversement proportionnelle à la distance de séparation entre les antennes.
Les produits VN-300 et VN-310 GNSS/INS de VectorNav sont des exemples de systèmes GNSS/INS à double antenne. Les systèmes GNSS/ INS avancés avec compas GNSS intégrés tels que les VN-300 et VN-310 peuvent automatiquement faire la transition entre la solution de cap à double antenne et l’alignement dynamique pour obtenir le cap le plus précis possible, en fonction du mouvement en temps réel des systèmes.
GNSS STANDARD VS RTK ET INS DE QUALITÉ INDUSTRIELLE VS TACTIQUE
Les capteurs inertiels sont de différentes qualités, en fonction de leurs budgets d’erreur induits par le gyroscope. Les applications ISR nécessitent généralement des IMU de qualité industrielle ou tactique. Il peut y avoir une différence d’ordre de grandeur entre eux.
RTK implique l’utilisation d’une station de base au sol en plus du récepteur GPS / GNSS à bord de l’avion, et donne un degré de précision de positionnement plus élevé. RTK a cependant ses limites: taille, poids et puissance supplémentaires, coût, matériel supplémentaire avec station de base, portée à station de base, etc.
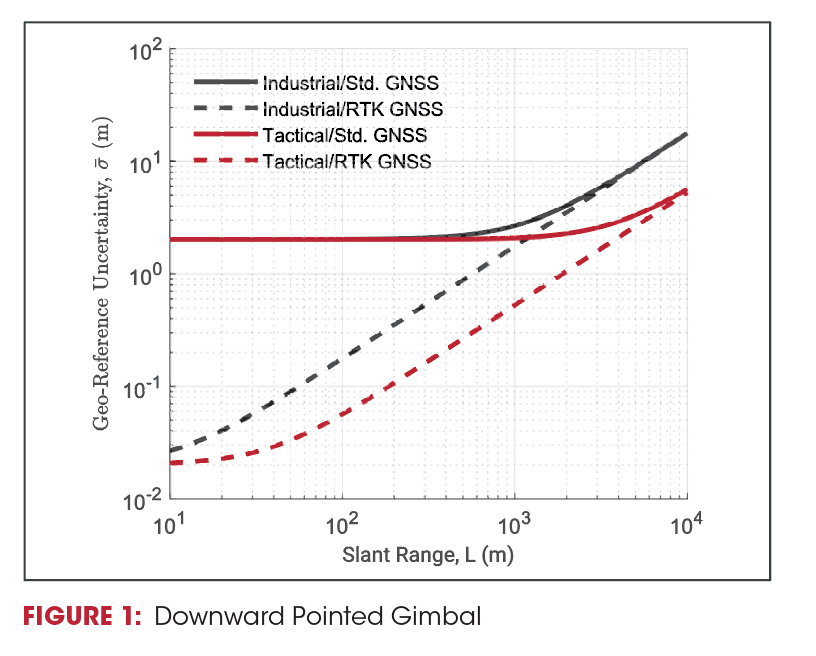
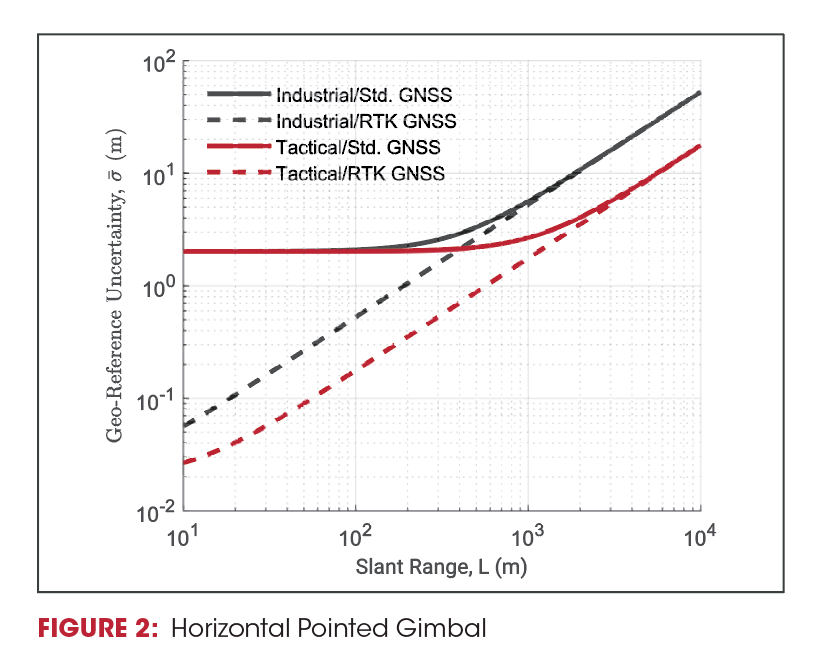
Figures 1 et 2 afficher les contributions des incertitudes de superposition d’image du GNSS / INS, en fonction des performances inertielles de qualité industrielle vs de qualité tactique, et du positionnement GNSS standard L1 uniquement par rapport au positionnement GNSS RTK externe.
Étant donné que la précision de cap est bien pire que la précision de tangage / roulis, Figures 1 et 2 montrer également les incertitudes selon que la caméra à cardan est généralement orientée vers le bas (erreurs de lacet négligeables) ou horizontale (erreurs de lacet dominantes). À courte portée (<100 m), la précision du GNSS domine la précision du système, tandis qu’à longue portée (> 1000 m), la performance de l’INS est déterminante.
BUDGET D’ERREUR SYSTÈME ISR
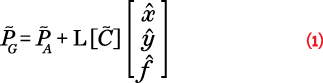
La solution de pointage estimée du cardan (˜PG) peut être trouvé en prenant le décalage de la fonction dans l’appareil photo (xˆ, yˆ, fˆ) et la faire pivoter vers une trame de coordonnées Nord-Est-descendante (NED) à l’aide d’une matrice de transformation de trame de coordonnées estimée (C) et la multiplier par la plage d’inclinaison (L) et l’ajouter à la position de l’aéronef (˜PA) comme indiqué dans Équation 1.
Chaque terme dans les équations est sujet à des erreurs différentes provenant de différents capteurs. Le budget d’erreur détermine la contribution de toutes les sources de données – chaque capteur a une marge de précision inhérente – qui affectent la qualité des données acquises, pour vérifier si le degré d’incertitude de la solution de mesure répond aux spécifications minimales du travail.
Un budget d’erreur quantifie toutes les sources d’erreur dans un système et les accumule dans une performance totale du système. En comprenant comment certaines sources d’erreur affectent le système ISR, ainsi que l’ampleur de ces erreurs, les performances totales du système peuvent être améliorées grâce à des choix de conception plus intelligents et à des techniques d’atténuation des erreurs.
Il est utile de diviser les erreurs en erreurs de trame de coordonnées NED et en erreurs orthogonales à la plage oblique. Les erreurs directes de position sont généralement référencées dans un cadre de coordonnées NED, tandis que les erreurs liées à l’attitude peuvent être représentées perpendiculairement à la plage d’inclinaison.
Pour toutes les erreurs liées à l’attitude (∈ [°]), l’erreur de position (σ¯ [m]) peut être calculé en fonction d’une certaine distance (d) comme indiqué dans Équation 2. Cela peut être utilisé pour trouver l’erreur perpendiculaire à la plage d’inclinaison.
![]()
IMPACT SUR LES PERFORMANCES DU GNSS/INS
Un GNSS/INS introduit une mesure d’erreur dans les solutions de positionnement et de cap pour la suite de capteurs et ses données produites. Le budget d’erreur de l’incertitude GNSS/INS peut être divisé en erreurs de position GNSS /INS et erreurs d’attitude GNSS/INS.
Les erreurs de position reflètent en grande partie les erreurs de la solution GNSS. Ceux-ci sont causés par des inexactitudes des données d’orbite des satellites, des horloges satellites, du bruit du récepteur, du retard ionosphérique, du retard troposphérique et des signaux à trajets multiples ou réfléchis. Les erreurs de position horizontale et verticale GNSS se traduisent directement par ces mêmes erreurs dans la solution de pointage.
Pendant ce temps, les erreurs d’attitude sont largement déterminées par l’INS. Les capteurs inertiels sont soumis à plusieurs sources d’erreur courantes telles que la polarisation, la densité de bruit, le facteur d’échelle, les désalignements, les dépendances de température et la sensibilité g du gyroscope.
La contribution au budget d’erreur de l’incertitude d’attitude peut être calculée en trouvant l’erreur perpendiculaire à la plage d’inclinaison. La traduction exacte des erreurs de roulis /tangage / lacet aux erreurs de position dans le cadre de plage oblique (en fonction de l’angle d’aspect du cardan, α) peut être trouvée à l’aide de Équation 2 et les valeurs dans Tableau 1.
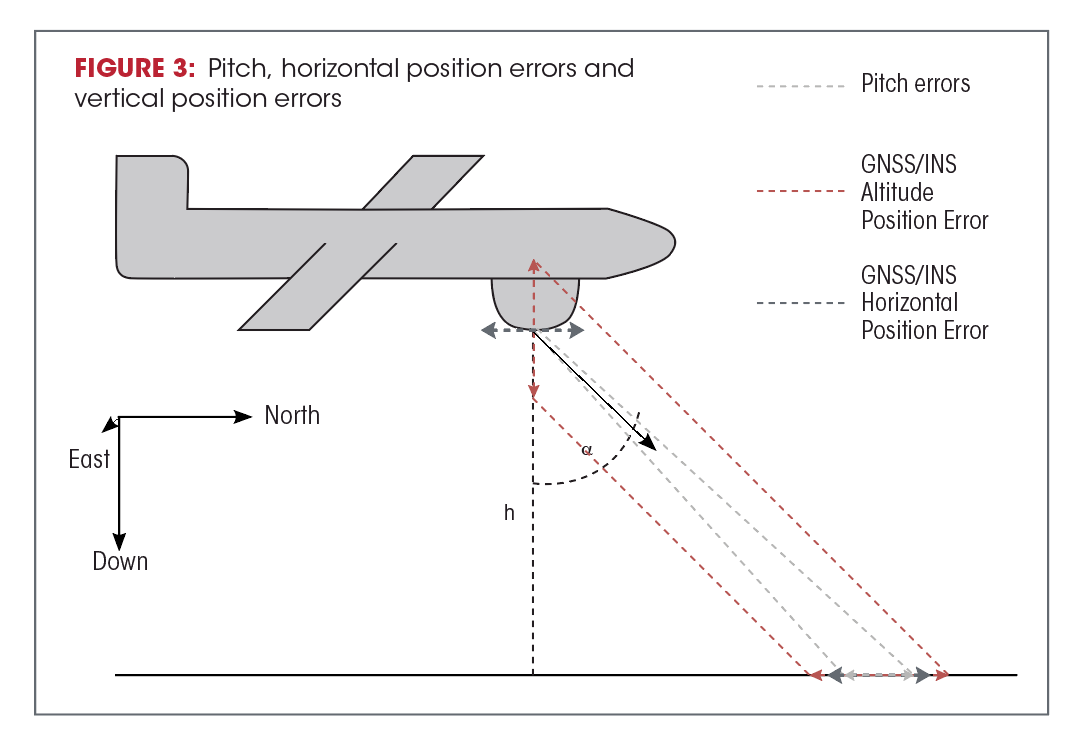
Plusieurs sources d’erreur INS doivent être prises en compte lors de la détermination de la quantité d’erreur acceptable pour une solution de navigation précise (voir Figure 3).Bien que non décrits en détail ici, ceux-ci doivent être pris en compte par des conseils professionnels dans la fabrication et l’installation d’un GNSS / INS sur votre plate-forme. VectorNav peut fournir de tels conseils.
AUTRES SOURCES D’ERREUR
En plus des contributions d’erreur du GNSS /INS, un concepteur ou un intégrateur de système doit tenir compte de divers autres termes dans le budget d’erreur, y compris les désalignements, les erreurs de synchronisation et les distorsions de la caméra.
Les désalignements entre le système de navigation et l’électronique de l’imageur dépassent parfois les erreurs d’attitude du système GNSS/INS lui-même, et leur effet peut être caractérisé de la même manière que les erreurs d’attitude du GNSS/INS, en utilisant Équation 2 et Tableau 1.
La synchronisation temporelle entre le système EO/ IR et le GNSS/INS est également essentielle. Toute erreur de synchronisation sera multipliée par les vitesses linéaires et angulaires du cardan pour créer des erreurs de position et d’attitude supplémentaires.
Pour compenser les erreurs de désalignement et de synchronisation, le système doit être étalonné pièce par pièce pour déterminer le décalage de désalignement fixe en comparant les valeurs mesurées du système à une source de vérité indépendante. Nous recommandons que cet étalonnage ait lieu dans un environnement de test de paillasse pendant la fabrication pour éviter l’introduction d’autres sources d’erreur pendant l’étalonnage.
Et bien sûr, le système EO / IR lui-même comportera des erreurs qui devront être prises en compte dans le budget d’erreur, allant des paramètres intrinsèques pouvant être calibrés, comme les distorsions de l’objectif et la distance focale, aux limitations de précision dues à la résolution de l’imageur et aux performances des algorithmes de traitement d’image.
EXEMPLE
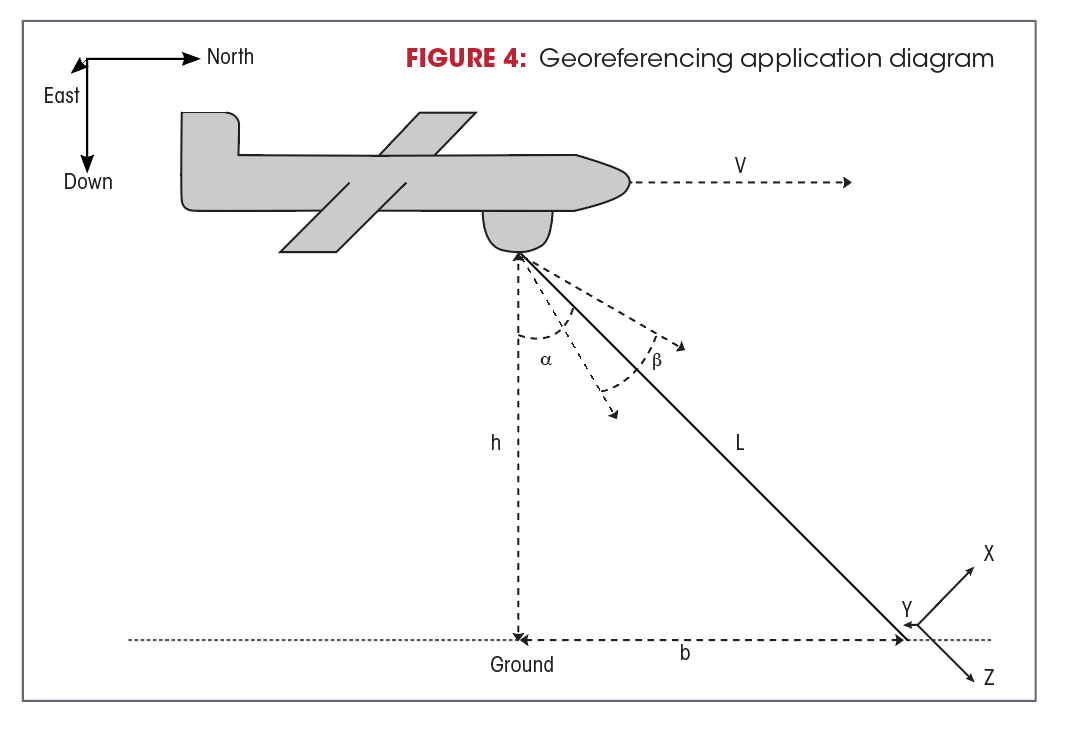
À titre d’exemple d’application ISR, nous examinerons le cas où une caméra d’arpentage est montée sur un avion. Une fois qu’une image est prise, un point est géoréférencé à l’aide d’un modèle numérique d’élévation (DEM) plat et de niveau combiné à l’attitude et à la position du cardan. Souvent, les applications ISR appellent à mapper un point ou une entité sur une image à un DEM lié à une trame de coordonnées globale (voir Figure 4). Cela peut être fait en essayant itérativement de trouver une plage d’inclinaison (L) telle que la solution de pointage s’aligne sur le DEM.
Parce que nous savons que notre point géoréférencé se trouve sur un DEM 2D, l’erreur n’existe qu’en deux dimensions. Dans ce cas, un avion se déplacera à 50m / s plein Nord à une hauteur de 1000m. Étant donné que le budget d’erreur de nombreuses sources d’erreur sur le cardan dépend de la plage d’inclinaison, l’exemple sera évalué avec le cardan pointé à 60 degrés directement devant le véhicule avec une plage d’inclinaison théorique de 2000m. Pour comparer les erreurs, la même configuration, le système GNSS / INS et la caméra doivent tous être utilisés.
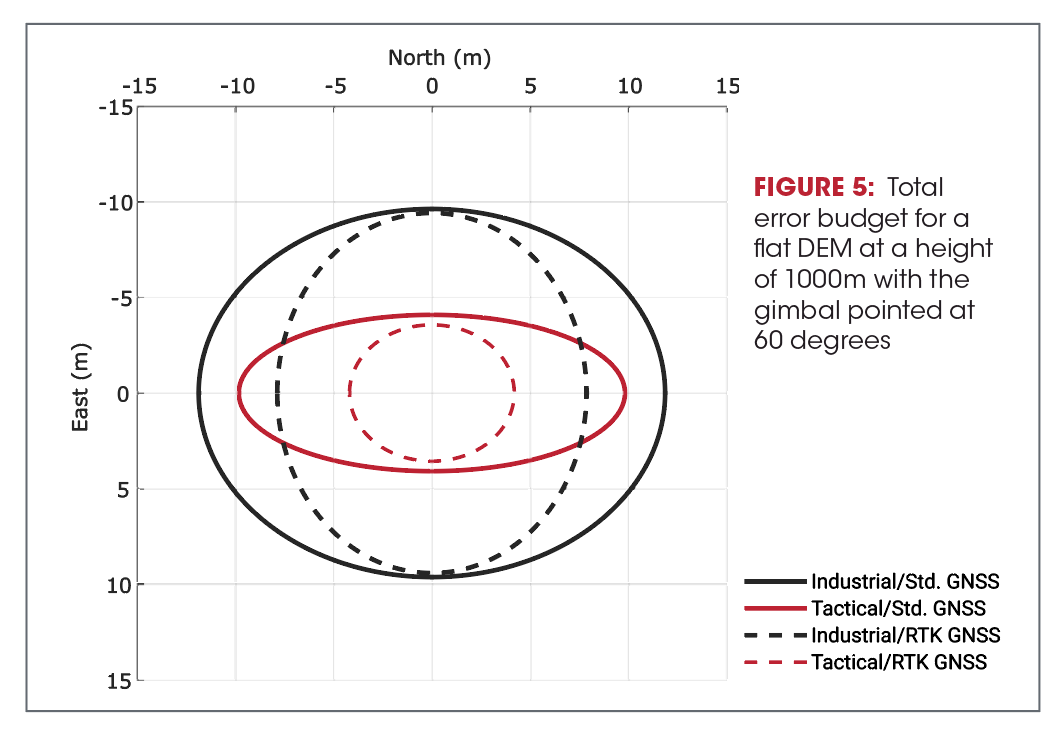
Dans un DEM plat, le budget d’erreur de l’incertitude GNSS/INS horizontale provient directement de l’incertitude de position horizontale GNSS dans une trame de coordonnées NED. Pour le GNSS standard, cela donne une erreur de 2m dans l’axe Nord et Est. La contribution de l’incertitude d’altitude du GNSS est projetée sur le DEM en fonction de l’angle d’inclinaison du cardan. La contribution de l’erreur de position peut être réduite au niveau centimétrique en utilisant RTK.
Figure 5 affiche le budget d’erreur global résultant, en utilisant tous ces calculs, pour différentes combinaisons de deux types de capteurs inertiels, industriels et tactiques, et de deux types de technologie GPS / GNSS, avec et sans cinématique en temps réel (RTK).
CONCLUSION
Nous avons décrit les facteurs critiques à prendre en compte dans le choix d’une intégration d’équipements inertiels et GNSS pour votre application ISR. De toute évidence, les calculs sont complexes et les résultats appellent une interprétation attentive! Et, chaque application a des exigences différentes; les relevés aériens effectués à 100 mètres d’altitude par un petit giravion d’UAV appellent une solution différente de celles effectuées à partir de 10 000 pieds par un avion piloté. Les professionnels de VectorNav peuvent vous guider tout au long du processus de sélection et d’installation tout aussi important pour votre travail spécifique. Aller à www.vectornav.com pour commencer le processus.