À mesure que les drones tactiques prennent de l’âge, la capacité de la technologie inertielle à supporter les pannes GPS tout en offrant une précision raisonnable à des taux de mise à jour élevés le maintient comme l’épine dorsale des systèmes de capteurs d’UAV. Le couplage inertiel avec le code M, les antennes anti-brouillage et la vision dans l’arsenal autonome peut faire de la somme des pièces une solution très robuste.
Dans les applications de défense, alors que les utilisateurs militaires cherchent à atteindre de nouvelles capacités avec des avions autonomes sans pilote, trois domaines principaux sont mis en évidence: le décollage et l’atterrissage verticaux (VTOL), le lancement d’UAV à partir d’autres avions volants et le blocage dans des environnements refusés par le GNSS. Le couplage d’une unité de mesure inertielle (IMU) à hautes performances avec d’autres technologies de détection et de navigation sur un drone dans un système de navigation inertielle (INS) hautement performant peut apporter une solution pour surmonter chacun de ces obstacles.
”L’INS assisté par GNSS est l’épine dorsale de ces types de systèmes », a déclaré Jeremy J. Davis, Ph.D., Directeur de l’ingénierie, VectorNav. « Il peut traverser les pannes GPS et le faire à des taux de mise à jour élevés, tout en restant raisonnablement précis. Au-delà de cela, différentes technologies habilitantes telles que le M-code anti-brouillage et la vision peuvent fusionner avec lui et fournir une solution plus robuste. C’est un espace d’activité intense en ce moment, et nous travaillons sur des solutions en interne et avec des partenaires qui répondent à ce type d’exigences et le font de manière transparente.”
VTOL, le lancement aérien et l’usurpation et le brouillage GNSS sont tous des problèmes difficiles d’UAV qui n’ont pas encore été entièrement résolus, mais les entreprises de pointe conçoivent des véhicules de nouvelle génération qui les prendront en charge.
VTOL
La possibilité de lancer et de récupérer un drone sans les dépenses, l’exposition et la logistique avancée requises par une piste présente des avantages tactiques évidents pour les combattants mobiles. Les giravions tels que les hélicoptères et les quadriporteurs ne nécessitent qu’une petite zone de décollage et d’atterrissage, mais ils sont inefficaces par rapport aux UAV à voilure fixe et ont une portée, une capacité de charge utile et un temps de séjour nettement inférieurs. Les drones à voilure fixe lancés par catapulte résolvent la moitié du problème, mais nécessitent toujours une piste de récupération — et les catapultes sont lourdes à transporter.
Les avions VTOL évitent tous ces inconvénients et apportent les avantages de croisière et de charge utile des UAV à voilure fixe. Il existe globalement trois approches du VTOL:
* un giravion hybride et un véhicule à voilure fixe, également connu sous le nom de quadplan, avec un ensemble d’hélices verticales pour le décollage et l’atterrissage et un ou plusieurs accessoires horizontaux pour la croisière;
* un véhicule à tiltroteur, utilisant les mêmes hélices sont utilisées pour la propulsion verticale et horizontale, en les faisant tourner en l’air par rapport au véhicule;
* UAV de queue-sitter qui décollent et atterrissent sur leur queue, comme une fusée, mais naviguent horizontalement, accomplissant les deux types de vol avec un seul ensemble fixe d’hélices.
Tous les types d’engins VTOL nécessitent plus de leurs systèmes de navigation que les autres types d’UAV. ”Le décollage et l’atterrissage sont les éléments de vol les plus dangereux et les plus risqués pour tous les types d’avions », a déclaré Davis. « Lorsque vous avez ces avions VTOL qui réinventent la façon de décoller et d’atterrir, cela présente des risques inhérents évidents. Tu dois t’assurer que tu as tous tes I pointillés et tes T croisés. »L’introduction d’une transition majeure en vol au début et à la fin d’une mission – les quadplans passent d’un ensemble d’accessoires à un autre, les tiltrotors font tourner l’ensemble de leur système de propulsion et les tailsitters passent de la portance de leurs ailes à celle de leurs hélices / rotors — présente plusieurs défis pour le système de navigation. VectorNav a travaillé à résoudre ces problèmes avec ses clients au cours des cinq dernières années et met cette expérience au service de ce qui devient rapidement la prochaine frontière pour les drones militaires tactiques. Les exigences sur le système de navigation comprennent:
* Fiabilité absolue.
Les autres dynamiques de contrôle doivent être soigneusement surveillées et gérées; il n’y a pas de place pour s’inquiéter si le système de navigation peut
faites confiance tout au long de la transition. Pour les tail-sitters, cela signifie également des algorithmes qui évitent le blocage du cardan lors de la rotation de 90 degrés en pas pendant la transition.
* Fonctionnement lent et rapide.
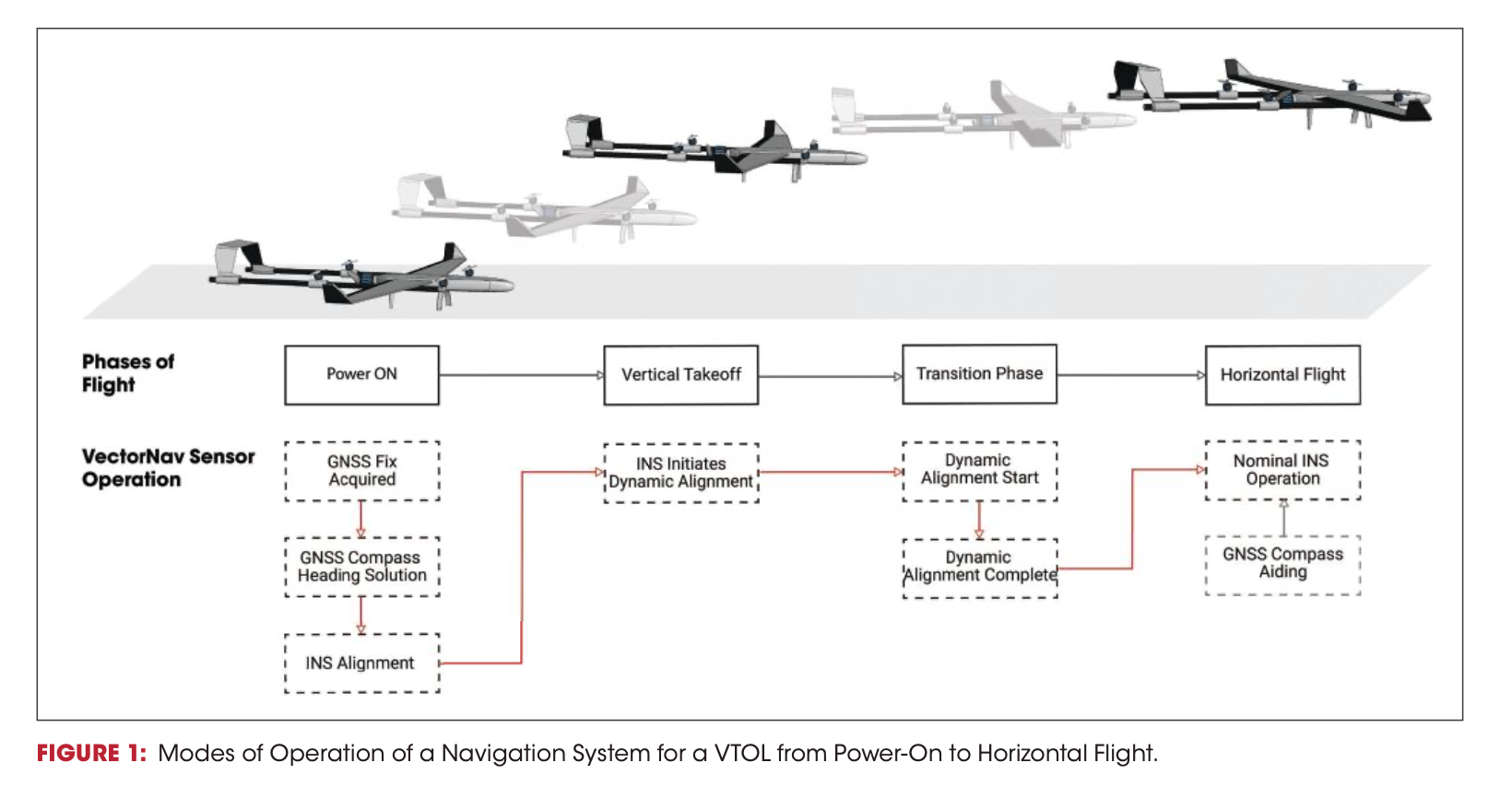
Pour suivre le cap, les avions en vol stationnaire s’appuient généralement sur une boussole GNSS : deux antennes GNSS distantes d’une distance fixe. Les aéronefs à voilure fixe utilisent un cap généré par l’INS suivant un processus d’alignement dynamique, corrélant le mouvement mesuré par le GNSS et l’IMU. Pour un avion VTOL, les deux techniques sont critiques pour différentes phases de vol, et le transfert entre les deux doit
soyez impeccable pour éviter les problèmes de composition pendant le commutateur de vol vertical-horizontal. Les systèmes GNSS à double antenne VectorNav comme le VN-300 et le VN-310 font une transition en douceur entre la source de cap la plus précise à un moment donné.
• Atterrissage.
Certains des systèmes les plus avancés en développement doivent atterrir sur des plates-formes mobiles telles que des navires ou des camions. Cela nécessite une précision extrêmement élevée. Un récepteur GNSS compatible RTK, comme ceux trouvés sur les unités de la série tactique VectorNav, peut fournir un positionnement relatif au niveau centimétrique à des taux de mise à jour élevés.
LANCÉ PAR AVION
Une façon de multiplier la portée d’un drone, tout en évitant les inconvénients d’une piste, est de le lancer à partir d’un aéronef beaucoup plus grand déjà en vol. Ces UAV sont souvent lancés sur tube, avec des ailes qui se déploient / se déploient dans les premières secondes de vol alors qu’il émerge de l’avion hôte déjà à des vitesses de croisière maximales. La phase de transition pour ces drones est assez dramatique.
Tout cela met à rude épreuve le système de navigation : des rotations de quelques 1 000 degrés par seconde dans le flux d’air et des taux d’accélération élevés. Il s’agit d’un trajet sauvage et roulant au cours duquel le GNSS est généralement perdu, que ce soit en raison des G élevés, du passage brusque de l’antenne GNSS de l’hôte à l’antenne de l’UAV, ou du fait que l’antenne de l’UAV peut ne pas pointer de manière fiable vers le ciel jusqu’à ce que le vol stable soit atteint.
Les UAV lancés par voie aérienne doivent également faire face aux chocs causés par le sillage de l’avion de lancement. Les chocs sont élevés et les accélérations et les vitesses angulaires ressenties immédiatement après le déploiement sont extrêmes jusqu’à ce que les ailes de l’UAV se déploient et puissent stabiliser l’engin. Stabilisation elle-même c’est une réalisation essentielle pour le système de navigation à contrôler, à se rattraper avant de tomber tête baissée.
C’est une poignée de secondes excitantes. Tout cela nécessite que le système de navigation fonctionne en mode de navigation inertielle pure, en suivant une charge en G élevée et des vitesses angulaires plus élevées. Comme pour l’avion VTOL, cette période juste après le lancement est essentielle au succès de la mission. Maintenir le niveau de précision d’attitude que VectorNav a atteint dans ces circonstances est un problème non trivial.
Le système de navigation de l’UAV doit également gérer un processus appelé alignement de transfert, dans lequel il s’initialise tout en restant à bord de l’avion hôte. Selon le système, cela peut être géré de différentes manières. Le système de navigation de l’avion hôte peut fournir une solution de navigation complète juste avant le lancement, à partir de laquelle l’UAV INS s’initialise, bien que cela nécessite une intégration étroite entre les systèmes avioniques. Ou, le système de navigation de l’UAV peut être activé pendant une courte période (30 secondes à plusieurs minutes) avant le lancement, avec des signaux GNSS fournis par une antenne montée sur l’avion hôte. Cela permet au GNSS / INS de s’initialiser complètement, puis de commuter sa propre antenne interne après le lancement. Cela peut être beaucoup plus robuste et permettre une intégration à moindre risque avec l’avion hôte.
”C’est la partie sauce secrète de l’accord », a déclaré Davis. « Faire fonctionner nos filtres et suivre le pré-lancement, puis en quelque sorte prendre ce filtre qui fonctionne dans les conditions plutôt bénignes du pré-lancement, et assurez-vous qu’il continue de fonctionner après avoir été soumis à un événement très élevé avec un tumbling fou et plus encore.”
ENVIRONNEMENTS À DÉFIS GPS
Le fait de devoir fonctionner avec un signal GNSS qui peut être faux, ou sans altogé- ration GNSS, pose un tout nouvel ensemble de problèmes pour un UAV tactique. Un usurpateur ou un brouilleur actif dans la zone de théâtre opérationnel interfère avec le récepteur GNSS embarqué de l’UAV, et les bonnes technologies d’atténuation doivent entrer en jeu pour maintenir un suivi précis dans ces environnements extrêmement difficiles.
Les récepteurs GPS M-code sont maintenant progressivement déployés dans l’armée américaine et ceux de ses alliés remplacent les récepteurs SAASM (Module Anti-Usurpation de disponibilité Sélective) qui avaient auparavant déjoué les tentatives d’usurpation. La technologie M-code tire également parti des nouveaux signaux plus puissants des derniers satellites GPS pour contrer le brouillage. La série tactique de systèmes INS de VectorNav prend pleinement en charge l’interfaçage avec ces nouveaux types de récepteurs.
Pour compléter l’atténuation de l’usurpation d’identité, les antennes anti-brouillage ou à motif de réception contrôlée (CRPA) sont constituées de plusieurs éléments, leur permettant des signaux nuls provenant de directions susceptibles de contenir des brouilleurs d’usurpation d’identité tout en amplifiant des signaux provenant de directions satellites connues.
La combinaison d’une IMU de qualité tactique avec un récepteur GNSS à code M et une antenne anti-brouillage fournit une solution de navigation robuste pour les environnements courants (usurpés) contestés par le GNSS.
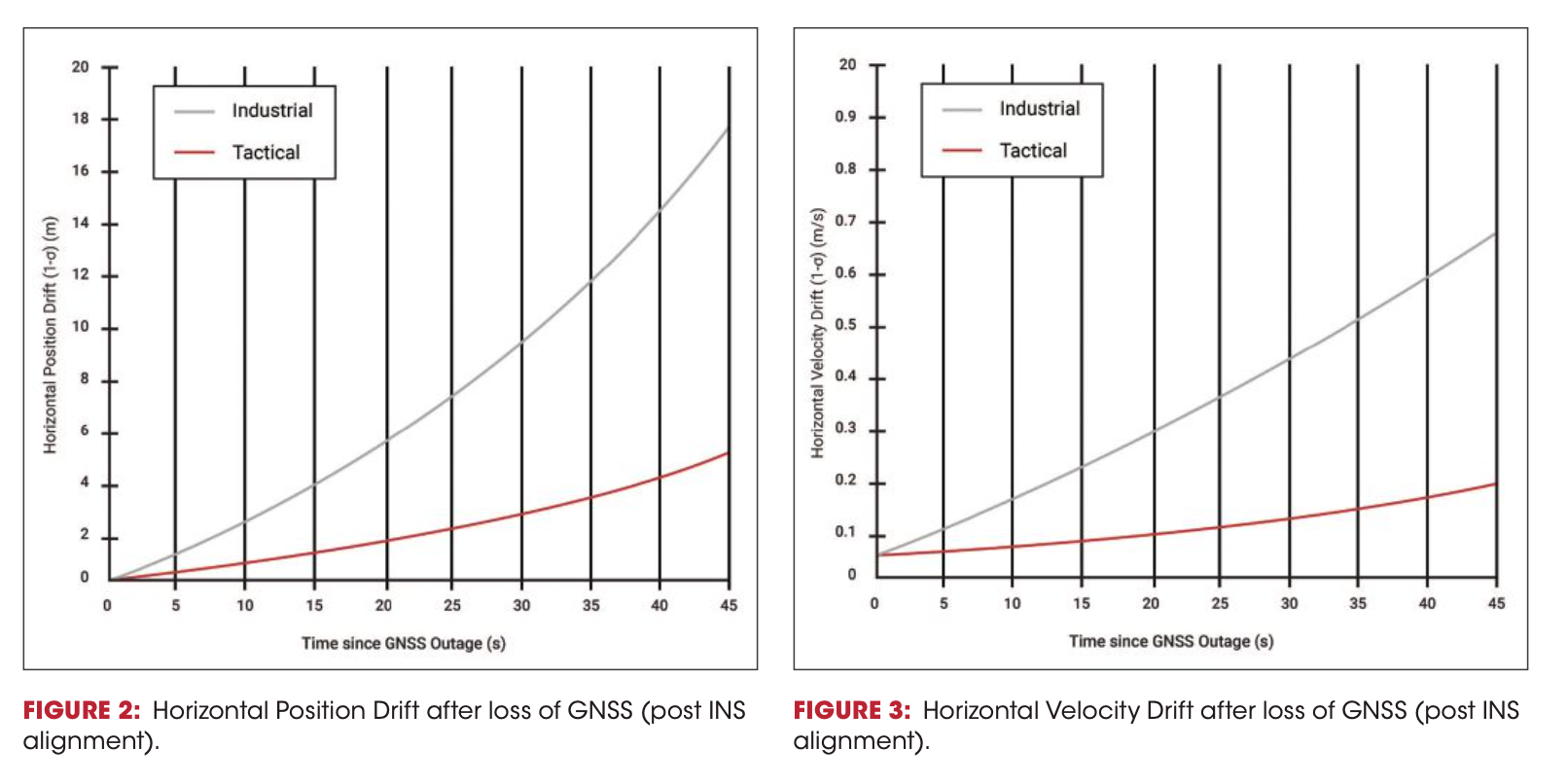
Les pannes GNSS de courte durée, d’une durée de quelques secondes à quelques minutes, peuvent être facilement gérées par les capteurs GNSS / INS de qualité tactique de VectorNav comme le VN-210, en s’appuyant sur l’intégration pure des accélérations et des vitesses angulaires rapportées par les capteurs inertiels pour assurer la navigation lorsque le GNSS n’est pas disponible.
”Parce que nous avons de bons IMU dans notre série tactique“, a déclaré Jakub Maslikowski, Directeur des ventes et du marketing chez VectorNav Technologies, « nous pouvons gérer les conditions difficiles du GPS pendant des périodes limitées. Dans la mesure où quelqu’un parvient à vous bloquer brièvement, les capteurs inertiels vous transporteront.”
GPS – REFUSÉ
De plus en plus, la poursuite des opérations dans des environnements contestés par le GNSS ne suffit pas : les drones doivent également fonctionner dans des situations totalement interdites par le GNSS, où de puissants brouilleurs ennemis tentent de contrôler le champ. Les systèmes plus grands, y compris les avions habités, peuvent s’appuyer uniquement sur un INS de niveau navigation, qui dérive de l’ordre de kilomètres par heure. Mais un INS de qualité navigation est beaucoup trop volumineux et coûteux pour la plupart des applications d’UAV.
La réalisation d’une navigation précise et fiable sans GNSS ni INS de qualité navigation est un domaine de recherche et de développement actif chez VectorNav impliquant de nombreuses technologies de détection différentes.
Les systèmes de caméras électro-optiques et/ou infrarouges (EOIR) sont de plus en plus utilisés pour la navigation refusée par GNSS. Un logiciel de traitement d’images traite chaque image pour identifier des caractéristiques uniques qu’il reconnaîtrait à nouveau dans l’image suivante prise, un processus appelé correspondance des caractéristiques.
Si un SAMU a des images de la zone prises avant la mission, par des satellites ou d’autres survols, cela permet une approche de correspondance de carte: faire correspondre les caractéristiques des images en temps réel à la carte d’image stockée pour la localisation, déterminant ainsi la position de l’UAV. Cela peut fournir une grande précision mais nécessite une préparation avancée importante. Il ne fonctionne que sur une zone déjà connue, parcourant un chemin prédéfini à une heure prédéterminée de la journée, car les ombres et les différences d’éclairage peuvent affecter la précision de la correspondance de carte ou d’image.
Lorsqu’une carte n’est pas disponible, les systèmes de navigation basés sur la vision peuvent créer leur propre carte au fur et à mesure, en utilisant la localisation et la cartographie simultanées (SLAM). L’inconvénient de SLAM est que la carte sera imparfaite et que ces imperfections se développeront avec le temps. Les erreurs de position de SLAM dérivent en fonction de la distance parcourue.
Tous les systèmes basés sur la vision luttent, naturellement, dans une visibilité limitée, comme les nuages ou le brouillard. Les systèmes de détection active comme le radar ou le LiDAR, qui émettent des impulsions laser pour produire une carte 3D, peuvent remplacer ou augmenter les systèmes de vision. Cependant, la détection active présente l’inconvénient de révéler potentiellement sa propre position à l’ennemi à travers les signaux émis.
Enfin, toutes ces technologies échouent lorsque l’environnement, comme les grandes étendues d’eau ou un désert de sable, ne contient aucune caractéristique distincte.
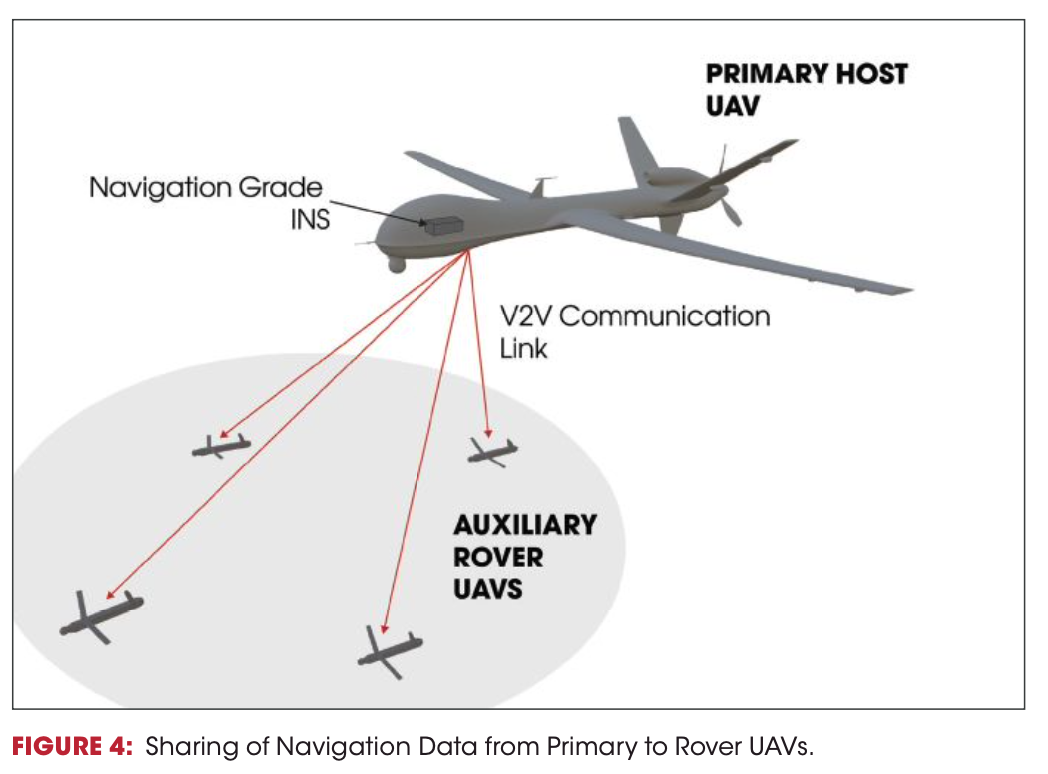
Comme alternative à l’équipement de petits UAV avec des systèmes de navigation complexes refusés par GNSS, un “ système de jumelage ” d’aéronef peut impliquer plusieurs UAV opérant à proximité d’un avion plus gros équipé d’un INS de qualité navigation. Les INS de grande taille, lourds et coûteux peuvent voler pendant des heures sans dériver plus de quelques kilomètres. Celui-ci partage ensuite son emplacement avec les DRONES plus petits grâce à diverses combinaisons de liaisons radio, de marqueurs visuels et d’autres techniques.
De toute évidence, il n’existe pas de solution unique pour contrer le brouillage du signal GNSS dans toutes les conditions. Un système robuste, fiable et polyvalent doit combiner plusieurs technologies, jouant les forces des uns sur les faiblesses des autres. C’est là qu’un système INS hautement adaptable et flexible avec une IMU de qualité tactique peut fournir une valeur énorme, fonctionnant comme la liaison d’un système multi-capteurs. VectorNav travaille depuis des années avec certaines des entreprises les plus avancées pour explorer chacune de ces technologies et les intégrer à des algorithmes pour une solution anti-brouillage puissante.
CONCLUSION
Les drones VTOL et les drones aériens modifieront considérablement le paysage des drones à usage militaire. Leurs profils de vol uniques, cependant, nécessitent des systèmes de navigation sophistiqués qui vont au-delà des capacités INS traditionnelles. VectorNav prend la tête de l’intégration des dernières technologies de navigation pour gérer ces situations exigeantes.
Rendre ces systèmes robustes aux conditions refusées par le GPS signifie intégrer les dernières technologies PNT, du code M à l’anti-brouillage en passant par la vision. Travailler en étroite collaboration avec un partenaire comme VectorNav qui peut s’intégrer à ces différentes technologies complémentaires peut apporter une valeur ajoutée considérable et économiser des ressources d’ingénierie considérables. Aller à www. vectornav.com pour commencer le processus.